Tactile Robot Models¶
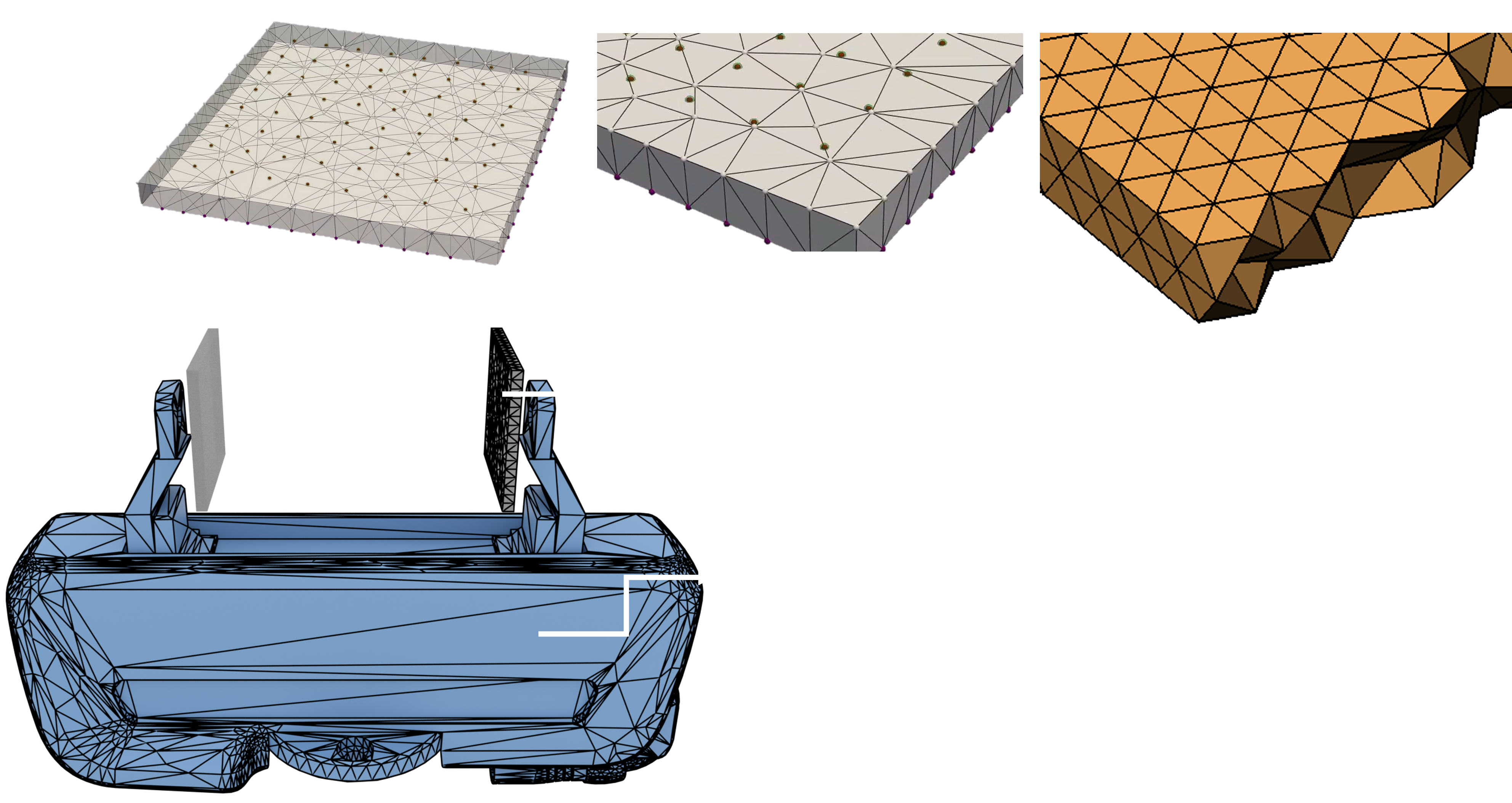
In Taccel, the robot links are represented by affine bodies, while the gel pads are discretized as tetrahedral meshes.
- class taccel.taccel.TactileRobot(urdf_path: str, mesh_dir: str | None = None, actuated_joints: list[str] | None = None, env_id: int = 0, device: device = device(type='cuda', index=0), use_collision: bool = False)¶
Bases:
RobotA class representing a tactile robot with various tactile sensors.
- __init__(urdf_path: str, mesh_dir: str | None = None, actuated_joints: list[str] | None = None, env_id: int = 0, device: device = device(type='cuda', index=0), use_collision: bool = False)¶
Initializes the TactileRobot object.
- Parameters:
urdf_path (str) – Path to the URDF file.
mesh_dir (str | None, optional) – Directory containing mesh files. Defaults to None.
actuated_joints (list[str] | None, optional) – List of actuated joints. Defaults to None.
env_id (int, optional) – Environment ID. Defaults to 0.
device (torch.device, optional) – Device to load the tactile data onto. Defaults to torch.device(“cuda:0”).
- property gel_handles¶
- property num_tac¶
- property num_tac_verts¶
- property num_tactile_markers: int¶
- property tac_coll_layers: List[int]¶
- property tac_gel_E: list[float]¶
- property tac_gel_density: list[float]¶
- property tac_gel_friction: list[float]¶
- property tac_gel_nu: list[float]¶
- property tac_rest_meshes: list[UnstructuredGrid]¶
- property urdf_path: str¶
Returns the path to the URDF file.
- write_urdf(target_path: str | None = None)¶
Write the modified URDF back to file