Taccel Examples¶
Peg-Insertion¶
The peg-insertion example migrated from the Experimental Release of SAPIEN-IPC.
python -m examples.peg --num_envs NUM_ENVS
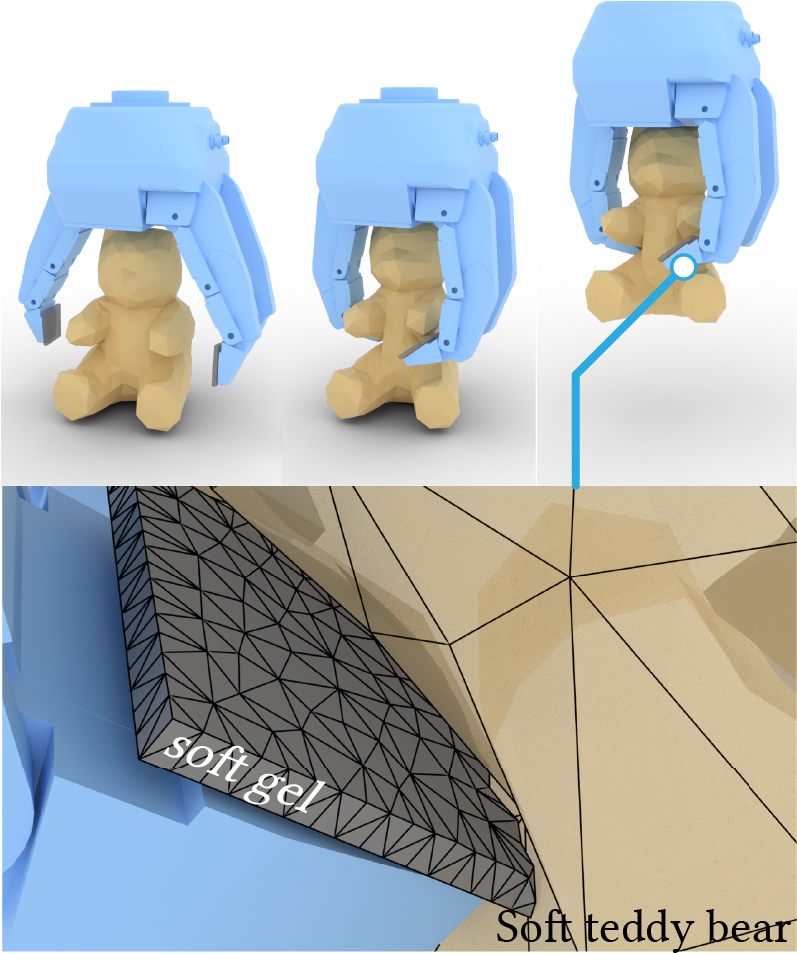
Grasping Deformable Object¶
We provide a deformable object grasping example, where a RobotiQ-3Finger robot, integrated with 3 tactile sensers at the tips, grasps a soft teddy bear on the ground. The implementation is parallelized, so you can run multiple environments by NUM_ENVS at the same time:
Note that this tasks shows an example of using Y-up coordinate.
python -m examples.grasp_soft_teddy --num_envs 2 --viz
Tac-Man: Tactile-informed Manipulation¶
To run the Tac-Man examples, run the script:
python -m examples.tac_man --joint_type JOINT_TYPE --seed SEED
Available JOINT_TYPE options:
revolute: Revolute joint.prismatic: Prismatic joint.helical: A bolt-and-nut set.
Note that the tactile signals will be displayed via an OpenCV window. When running on a headless server, you will run into the error:
pyglet.display.xlib.NoSuchDisplayException: Cannot connect to "None"
This could be solved by running headlessly, specified by the --headless flag.
Note that the OpenGL visualization is still under active development, so the renderer should show nothing in this demo.